A aluna de graduação em Ciência da Computação do Departamento de Ciência da Computação da Universidade Federal de Minas Gerais (DCC/UFMG), Taynara Cruz, orientada pelo professor Douglas Guimarães Macharet, estudou em seu trabalho de conclusão do curso a aplicação de técnicas de inteligência artificial para identificar automaticamente possíveis locais em que a vegetação apresenta risco à rede elétrica.
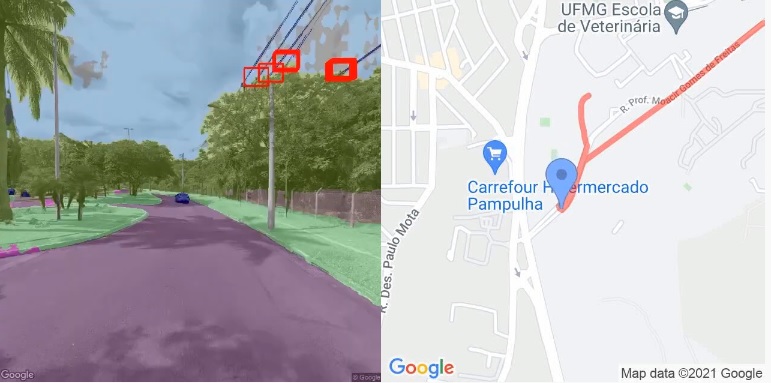
A princípio a aluna pensava especialmente no tema de carros autônomos, mas como não havia a disponibilidade de um veículo assim para o desenvolvimento, Taynara foi orientada a inicialmente construir um simulador mais realista para aplicações de visão computacional. “A ideia seria simular exatamente o que uma câmera fixada em um carro estaria vendo e, para isso, usamos imagens do sistema Google Maps. Taynara tem experiência anterior em Robótica e Visão Computacional, além disso, realizou Iniciação Científica anteriormente, sendo destaque na Semana de Iniciação Científica de 2019 com o trabalho “Avaliação de Métricas de Segregação em Exames de Robôs”, e indicada na lista de Relevância Acadêmica na Semana de Iniciação Científica de 2021 com o trabalho “Controle De Congestionamento Em Enxames De Robôs Heterogêneos”, o que facilitou bastante concretizar o estudo”, contou Douglas.
Analisando a interferência de árvores na rede elétrica como uma das grandes causas de interrupções do fornecimento de energia e que essa identificação pode nortear decisões adequadas para a poda preventiva e, já tendo uma versão inicial do simulador, em conjunto com o professor, a aluna optou por usá-lo para solucionar algum problema mais aplicado. “Após algumas conversas, identificamos esse problema da vegetação em redes elétricas e achamos que seria um bom exemplo. Esse é um problema interessante e bem prático e certamente poderia apresentar ganhos econômicos para as concessionárias de energia elétrica, além de minimizar danos e prejuízos à população. Ao mesmo tempo, um dos objetivos era desenvolver uma solução simples, que não dependesse, por exemplo, de um conjunto de treinamento muito grande”, relatou o professor.
Apesar do trabalho se mostrar bem promissor e com resultados iniciais interessantes, segundo o professor ainda existe um longo caminho até ser efetivamente colocado em produção. “A ideia foi realmente mostrar o potencial da solução e, quem sabe, a partir de um financiamento externo conseguir aperfeiçoá-lo e transformá-lo em um produto”, concluiu.
Para apresentação do trabalho foi produzido um vídeo apresentando a navegação simulada do veículo (posição geográfica) e a identificação dos locais de risco (quadrados vermelhos), que está disponível no Youtube do VerLab – Laboratório de Visão Computacional e Robótica.